
Sistemi di visione per guida robot 3D
Serie 3D VGR
Sistemi di visione per guida robot 3D Serie 3D VGR

Capacità di rilevamento e facilità di utilizzo senza paragoni per applicazioni di presa da cassone tramite robot
Hardware e algoritmi esclusivi per i sistemi di visione per guida robot 3D.

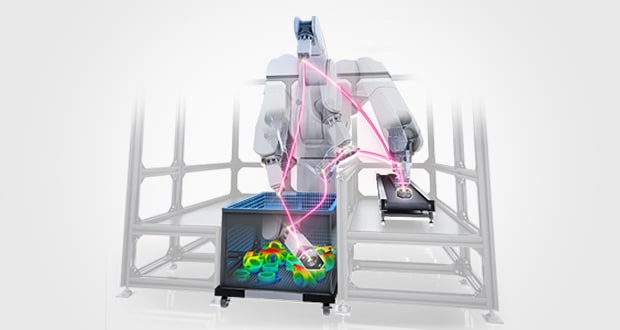
Il sistema di guida robot 3D di KEYENCE si distingue per la capacità di rilevamento degli oggetti e la facilità d'uso senza paragoni. Questo sistema permette di automatiz...zare i processi di assemblaggio, de-pallettizzazione e asservimento dei macchinari. Per generare i dati 3D, il sistema acquisisce 136 immagini con 4 telecamere, mentre il proiettore ad alta velocità emette pattern luminosi a strisce. Per configurare il sistema si segue una semplice procedura che permette di tarare automaticamente le camere. Inoltre, è possibile caricare i dati CAD del pezzo da rilevare. Per ciascun oggetto rilevato, lo strumento di pianificazione del percorso calcola un percorso completo del robot per prelevare e spostare il pezzo in modo efficiente, evitando tutte le collisioni con il cassone o la cella. Tutto il processo può essere simulato sul proprio PC, grazie al simulatore di prelievo incorporato che consente di testare diverse pinze o design della cella e simulare i risultati di prelievo senza modificare l'hardware.

Caratteristiche
I sistemi ottici appositamente progettati e gli algoritmi di ricerca 3D offrono performance ad alta precisione e ad alta velocità
Si ottiene l'immagine 3D ottimale grazie al design a 4 telecamere, che possono creare un'immagine priva di punti ciechi. La funzione di ricerca 3D di nuovo sviluppo per applicazioni presa da cassone consente il rilevamento stabile dei target, indipendentemente da posizione od orientamento.
Design integrato composto da quattro telecamere e singolo proiettore

Dotato di una funzione di scansione 3D di nuova concezione

Identificazione automatica dei movimenti del robot, tenendo conto degli ingombri della cella e della posizione del robot
Strumento di pianificazione del percorso
Pianificazione automatica dei percorsi del robot
I percorsi di movimento del robot sono calcolati automaticamente per eliminare tutte le collisioni di robot, target e area circostante, per ridurre notevolmente i tempi di programmazione del robot e consentire operazioni di presa senza interruzioni.
Simulatore di prelievo
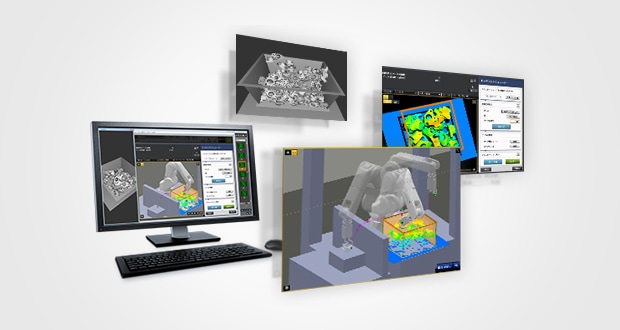
Simulazione di prelievo nella cella di lavoro
La cella di lavoro e il programma possono essere progettati nel simulatore prima del completamento di qualsiasi configurazione fisica, il che permette di identificare potenziali problemi di configurazione e aumentare notevolmente i tassi di successo della presa.